全生命周期自动校准
欧思徕智能自适应在线标定技术(SAOC®技术)实现扫描仪全生命周期自动校准,扫描仪自使用之日起,无论使用频率如何变化,点云厚度始终如一,精度永不衰减,无需停工返厂校准。
欧思徕智能 R8 | 真彩色厘米级·专业测绘型
产品咨询旋转式单激光雷达扫描仪
1 cm
平面 1.8 cm
高程 2.5 cm
0.015°
1 cm
4 万点/m²
2 cm
相对精度
绝对精度
水准/水平度和垂直度精度
点云厚度
点云密度
重复作业点云套合精度
R8满足
测绘级5A标准
在地理信息空间中,任何人在任何时间,使用任何设备,采用任何路
线,扫描任何场景,能且只能获取唯一点云成果,不能有二义性。

全生命周期自动校准
欧思徕智能自适应在线标定技术(SAOC®技术)实现扫描仪全生命周期自动校准,扫描仪自使用之日起,无论使用频率如何变化,点云厚度始终如一,精度永不衰减,无需停工返厂校准。
大场景3D高斯建模
欧思徕智能3DGS专为应对超大规模、超复杂场景的数字化挑战,实现对工业园区、大型基础设施等宏观场景的一体化精细建模。支持自动生成超逼真、超清晰的大场景模型,杜绝模糊与失真,具备照片级的视觉质感。
重复作业点云套合精度
重复测量精度是检验测量装备精度的一个重要指标,R8满足测绘级5A标准,经受住了检验,R8重复作业点云套合精度小于2cm,单次扫描获得的点云完全可以作为值得信赖的数据成果。
R8
两次作业点云套合精度
点云坐标为CGCS2000绝对坐标

某移动式三维扫描仪
两次作业点云套合精度
点云坐标为CGCS2000绝对坐标

*蓝色点云和绿色点云分别为两个人,使用两台设备,在不同时间,采用不同路线,扫描同一处场景,获得的两个点云。
全景图像与彩色点云双屏联动
R8具备全景图像与彩色点云双屏联动功能,用户能够在点云和全景图像中同步查看相同的场景地物。
PPK-SLAM®紧耦合互补滤波技术
RTK在环境遮挡导致接收到的卫星信号质量差的情况下易出现假固定,RTK的假固定会造成点云绝对精度下降。PPK-SLAM®技术能够利用后差分获得的真固定解,进而获得满足平面1.8cm,高程2.5cm的CGCS2000绝对坐标点云。
使用高精度彩色点云生产1:500数字线划图

点云“横平竖直”
R8生产的是符合CGCS2000等大地坐标系下绝对水平和绝对垂直的点云数据,水准/水平度和垂直度精度均优于0.015°。


精度报告书
每个工程得到的点云成果都有一份精度报告,点云的精度自此有了“护身符”,为高标准完成项目任务保驾护航。
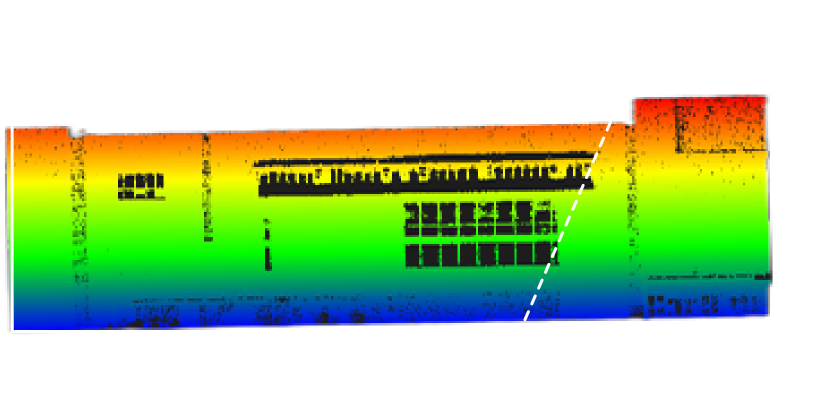
精度热力图点云
多视角点云 “热力图” ,不同颜色表示不同精度,全面掌控不同精度的点云所在的位置。
控制点规划工作建议书
若点云中某处精度不符合项目要求,则以 “推荐补充控制点位置分析” 给出补打控制点的数量和位置,使得作业员不再盲目多次补打控制点,节省时间和成本,高效率高质量完成项目。
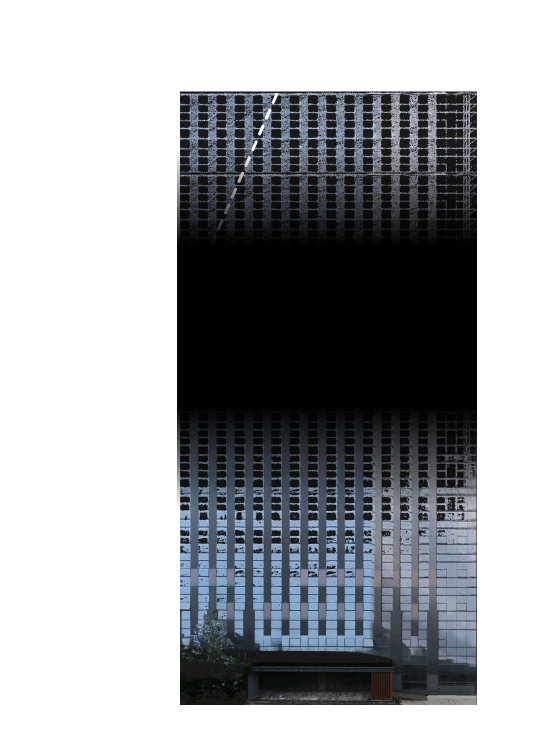
点云刻画“细致入微”
R8得到的原始未滤波点云的厚度为1厘米,点云棱角分明不失真,远距离文字结构清晰可见
